

Solución desarrollada para la aplicación automática de cinta adhesiva con un robot colaborativo.
Se realiza la trayectoria de la aplicación sobre la pieza mientras el cabezal dispensa la cinta adhesiva manteniendo la tensión adecuada y realizando el corte tras la aplicación.
Cabezal para aplicación automática de cinta adhesiva
El cabezal de aplicación de cinta presentado es un desarrollo de Alpe Industrial. Se trata de un mecanismo de arrastre de cinta automático gracias al avance generado por la trayectoria del manipulador. Además dispone de un mecanismo de corte y retención de cinta neumático que permite una buena precisión y tolerancia de medida.
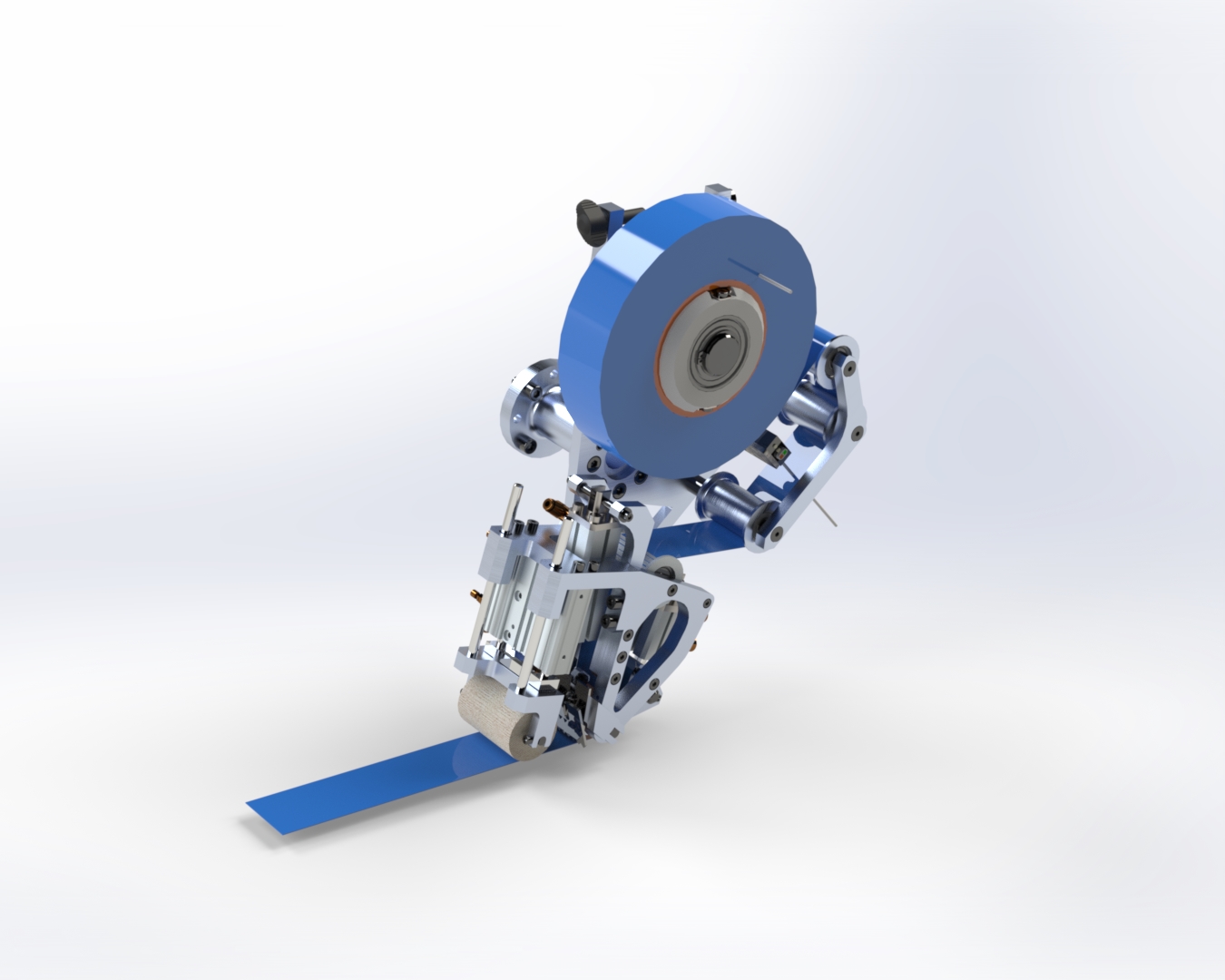
El sistema de cambio y enhebrado de bobina es simple y rápido y no requiere el desperdicio de cinta. El modelo incorpora dos sensores, una para detectar el nivel el nivel de cinta y activar un aviso cuando restan “x” metros y un segundo detector de fin de rollo.
Como elemento modular dispone de un pisador con rodillo semirrígido adaptable para garantizar la adhesión de la cinta al producto.
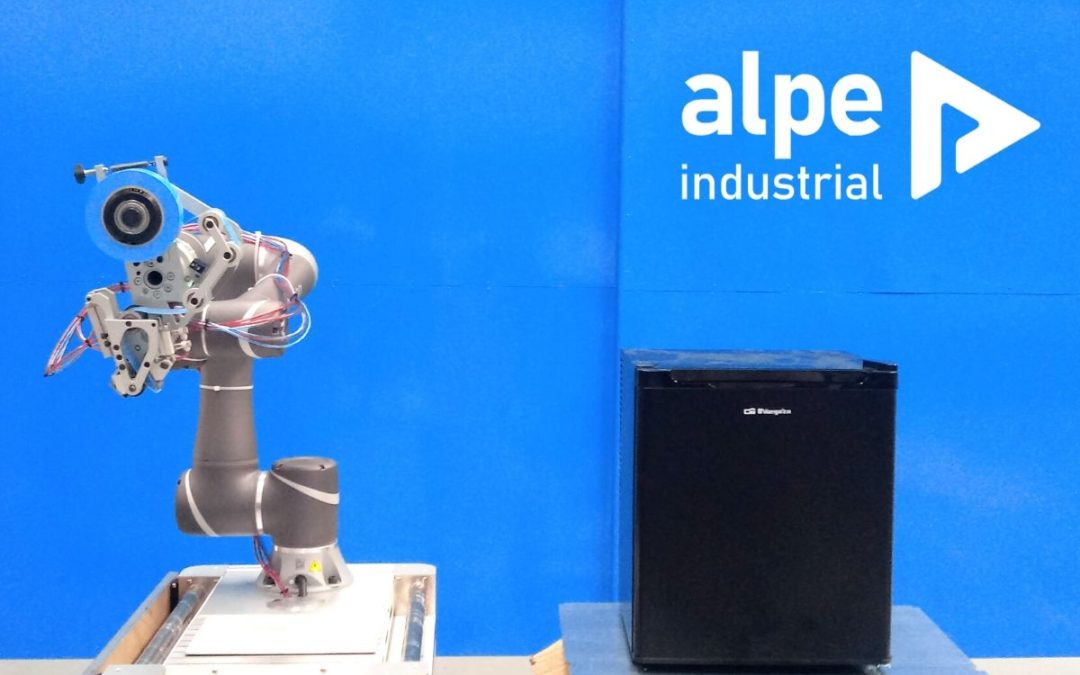
Robot Colaborativo con cabezal integrado
Se integra el cabezal en un robot de 6 ejes con función colaborativa (cobot).

Este robot colaborativo dispone de un software de control muy intuitivo que permite su programación de manera sencilla sin poseer prácticamente nociones de robótica y/o código de programación en general. Además del cobot, queda integrado un soporte con regulación en altura donde se ubicaría el controlador en la base y el propio brazo robótico en la peana.
Para proteger los movimientos del robot y limitar su velocidad de proceso y paro de emergencia se dispone de un escáner de área solidario a la base de la peana del robot. El escáner estará programado para generar distintos modos de trabajo del robot.
Cabe la posibilidad de ubicar un cerramiento con una barrera de óptica inmaterial de seguridad. De esta forma el robot podrá trabajar a máxima velocidad (zona no segura) cuando el scanner no detecte presencia de personas y cuando sí detecte, trabajar en modo colaborativo (zona segura).
El control de la instalación lo realizara el propio robot, contando con una mínima comunicación con la línea productiva (emergencias, señal de presencia paleta, señal de ciclo acabado).
Se instala un monitor en el propio robot para control, movimentación en modo manual, visualización de alarmas y diagnosis de toda la célula. Desde esta pantalla se dará acceso a otros parámetros configurables (los que se requieran, podrán ir protegidos con contraseña).
👇 👇 👇